SICK FROM MICRON TO MILE | 3D 激光雷达
继上周与各位分享了从微米到英里(FROM MICRON TO MILE)家族的广泛应用范畴,今天我们将带来用于移动式工作设备的 3D LiDAR 区域扫描传感器。
更多层面开辟更多视角
驾驶辅助系统基于SICK的 3D LiDAR 区域扫描传感器(也称三维激光雷达)或3D视觉传感器可靠检测移动式工作设备周围的安全盲区,并及时提醒操作人员注意危险和事故源。除了采用3D视觉传感器Visionary-B的智能3D辅助系统,3D LiDAR 区域扫描传感器MRS1000还提供掉头和导航支持。
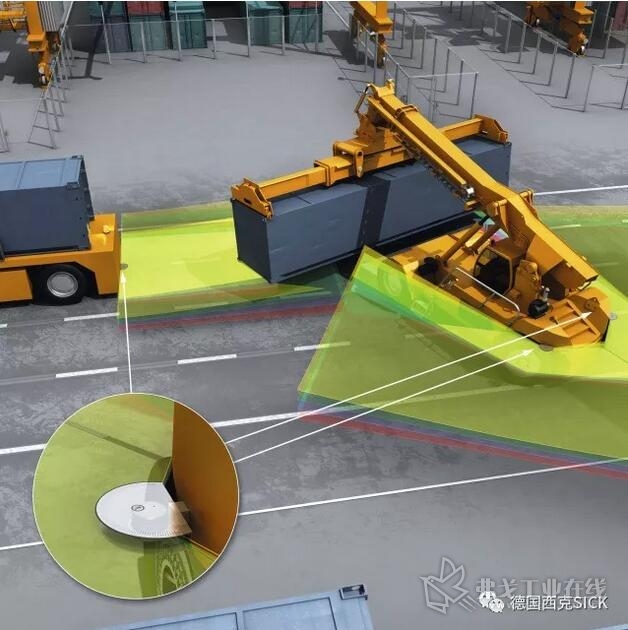
(港口内的装卸情况:MRS1000通过可靠辨识环境为起重机驾驶员提供支持以及协助正面吊司机装卸集装箱)
在建筑工地上和地面与地下开采中,掉头和倒车是导致事故的常见原因,在港口等货物转运场所也会发生碰撞。除此之外,农业中不精准的施肥或收割流程将造成损失,例如当收割机未正确识别割晒堆列的轮廓时。与此同时,这些行业还面临巨大的效率压力:农业必须为越来越多的人口生产越来越多的食品,而一些原材料开采继续盈利,工作流程的效率必须提高。建设项目始终处于巨大的时间压力下,而且由于人与机器的紧密合作涉及更大的事故隐患。
但如果有合适的技术设备为机器操作人员提供支持,大量碰撞和事故就能得以避免。在此单一的警告功能往往不够充分,系统也要能够根据其相关性区分物体,以进行碰撞警告。这种区分需要依体积检测物体,另一项挑战在于应用范围中有时较为恶劣的环境条件。
识别环境,排除危险
基于SICK在激光技术领域数十年累积的专业知识,3D LiDAR 区域扫描传感器MRS1000如今为“外勤工作”的驾驶辅助系统开辟了多样化视角。
传感器在四个位置采集多大55,000个测量点。MRS1000伴随每条测量光束发出三个回波信号,从而将测量点数量增加到每秒最多165,000个。各层面沿水平方向上下排列,从传感器发出并形成扇形展开。例如,在20m的距离处MRS1000可覆盖2.70m的高度。
挖掘机也能得益于MRS1000的多种用途。例如MRS1000可监控挖掘机臂的移动,传感器检测所有活动元件彼此间的绝对定位,机器操作人员可据此调整,加快或减慢移动。

(通过在四个平面上同时测量,MRS1000也能检测到位于地面上或伸入路径的物体。中型挖掘机驾驶员的视野就已严重受限)
保证通览
MRS1000采用创新技术HDDM+,该技术实现远距离测量,并因低测量值噪声及多重回波功能而出众。
借助可单独设置参数的回波滤波器,3D LiDAR 区域扫描传感器将不必要的测量数据和信号剔出,例如受到雨雪、灰尘和其他环境干扰因素音响的。同时直接在传感器内以较高的扫描速度和测量区域覆盖进行区域分析。
凭借其在垂直方向上275°的大孔径角,MRS100可覆盖长达64m的工作范围。因此,MRS1000在最远64m的工作范围内涉及车辆周围的所有区域,也包括机器操作人员看不到的那些区域。
即使在能见度不良或存在移动物体的情况下,MRS1000也能借助伴随发出的每条测量光束的三个回波信号提供可靠的测量数据。根据使用条件不同提供附加过滤器,从而再度提高MRS1000的可用性。
例如在港口可使用烟雾过滤器。3D LiDAR 区域扫描传感器借此排除近距离内可能导致传感器误触发的不必要的回波。例如在露天开采和建筑工地多尘且恶劣的环境中,微粒过滤器可去除作为不相关的反射脉冲的尘粒。

在室内外区域灵活使用
MRS1000采用灵活而坚固的设计,可服务于各种各样的应用范围。其具有防护等级IP67的外壳不及耐受脏污和气候,还能承受-30℃到+50℃的温度变化。另外,MRS1000具有可灵活定位的接口,几乎不限制多层扫描仪的安装。根据个性化应用范围,可依任务调整区域轮廓。四个层面中的每一个都允许设置特定参数。利用SICK的成熟软件SOPAS ET配置MRS1000,通过web服务器方便快捷地实现传感器数据可视化。
为了让你更深入了解SICK从微米到英里(FROM MICRON TO MILE)产品系列的更多信息,我们已整装待发。欢迎登入SICK 官方网站获取更多信息。





























获取更多评论