未来机器人:视觉导航叉车AGV
金手指奖•2018年中国国际机器人年度评选——创新产品奖申报
企业名称:未来机器人(深圳)有限公司 VisionNav Robotics Limited
产品名称:视觉导航叉车AGV(视觉导航托盘式叉车AGV、视觉导航平衡重式叉车AGV、视觉导航前移式叉车AGV)
产品上市日期:2016年
产品特性

未来机器人视觉导航平衡重式无人叉车采用国内行业首创视觉导航技术,无需安装反射板、磁条等,无需改造客户现场,确保灵活性及扩展性。设计用于与人配合后的共同环境中,友好的用户界面使得所有控制和信息一目了然,独特的双模作业模式实现自动/手动控制的自如切换。未来机器人视觉导航平衡重式无人叉车额定载重1.5T,可提升4.5m,运行速度达1.8m/s,转弯不停车,行业首屈一指的运行速度和工作效率,性价比极佳,适用于仓库、生产线等货架取放、自动化滚筒线对接、高台取放货等应用场景。

未来机器人视觉导航前移式无人叉车采用国内行业首创视觉导航技术,无需安装反射板、磁条等,无需改造客户现场,确保灵活性及扩展性。设计用于与人配合后的共同环境中,友好的用户界面使得所有控制和信息一目了然,独特的双模作业模式实现自动/手动控制的自如切换。未来机器人视觉导航前移式无人叉车额定载重3T,提升可达9m,运行速度达1.2m/s,转弯不停车,行业首屈一指的运行速度和工作效率,性价比极佳,适用于高位堆垛场景。

未来机器人视觉导航托盘式无人叉车采用国内行业首创视觉导航技术,无需安装反射板、磁条等,无需改造客户现场,确保灵活性及扩展性。设计用于与人配合后的共同环境中,友好的用户界面使得所有控制和信息一目了然,独特的双模作业模式实现自动/手动控制的自如切换。未来机器人视觉导航托盘式无人叉车额定载重2T,运行速度达2m/s,转弯不停车,行业首屈一指的运行速度和工作效率,性价比极佳,适用于仓库、生产线等长、中、短距离平面搬运场景。
创新点
未来机器人(深圳)有限公司成立于2015年,是香港中文大学机器人研究院孵化的工业自动驾驶技术企业,得到了香港创新科技署、香港科学园及佛山市创新团队的重点资助。
公司自2011年开始,致力于将全球领先的视觉定位、控制、导航、多机调度、机器学习等核心技术应用于各类工业车辆(叉车、牵引车、港口机械、工程机械)的无人化改造中,并与我国制造业、仓储物流业、码头航运及航空航天等重要领域中的物料搬运环节紧密结合,实现“机器换人”。在提高企业生产、运营、管理效率的同时,大幅降低人工成本,解决客户招人难、用人难、管人难的问题,造福社会。

• 核心技术:强鲁棒性视觉SLAM、高精度视觉里程计、无准确位置反馈的视觉伺服控制等;
• 核心产品:视觉导航无人叉车系统(托盘式无人叉车、平衡重式无人叉车、前移式无人叉车)、视觉导航室外无人牵引车;根据客户需求,未来机器人可将客户现有电动叉车/牵引车改装成为视觉导航无人叉车/牵引车;
• 软件系统:为配合视觉导航无人叉车和牵引车在客户现场的运行,未来机器人历时两年,开发出一整套AGV系统软件,以实现中央控制及人机交互、车辆调度、库位管理、故障自检和虚拟路径绘制等功能。

相比于磁线、磁钉、二维码和激光等AGV传统导航方式,视觉导航方式具有以下三点主要优势:
►技术独特性强,门槛高(中国唯一采用视觉技术对工业车辆无人化改造的公司)
• 基于视觉的自然环境地图构建技术
• 基于视觉的高精度定位技术
• 高精度视觉伺服运动控制技术

►产品性价比高
• 传感系统简单,售价低廉(世界顶级品牌的工业级单目相机加镜头仅3000元,普通的商用相机售价百元左右,传感器低廉的成本大幅降低了视觉导航AGV的产品成本和售价;此外,未来机器人在自然环境下的视觉导航技术无需在环境中使用任何标记物,降低了客户现场的运维成本。综合以上两点,客户购买AGV设备的投资回报时间会大幅缩短。)
• 无须改造现场环境,施工周期短(未来机器人的核心是在自然环境中的视觉定位导航技术,无需对客户现场进行任何改变、无需磁线、磁钉、激光反射板等人工标记,仅通过视觉自然特征即可实现高效的定位导航。降低项目实施难度、减少实施时间)
• 运行效率高(从原理上讲,视觉捕获二维图像信息,图像中不仅包含轮廓信息,还包含颜色信息。其中,颜色信息是不能通过其他传感器得到的。而颜色信息对于移动机器人自主定位、控制、避撞纠偏都非常有价值。通过丰富的视觉信息,未来机器人的AGV产品及改装方案可以实现高效(前进速度2.0m/s,后退速度1.5m/s,转弯速度1.25m/s(柔性转弯)、高精度(位置误差<1cm)、高稳定性(失误率<0.1%)的自主导航。)
►适用于复杂工作环境
• 人机交互频繁的出入库场景--多重安全设计、托盘位置及姿态检测;
• 货物超板严重的大件仓场景--货物形状及轮廓检测;
• 精度要求高的立体货架场景--辅助人工视觉标记的高精度定位导航;
• 半室外的带板装卸货车场景--智能识别货物及车厢位姿并局部调整;
• 复杂多机器人协同应用场景--高效解耦调度、交通管制区域设计;
• 与电梯、机械手、自动立库、辊道线等设备对接场景--通信数据安全和重复校验机制
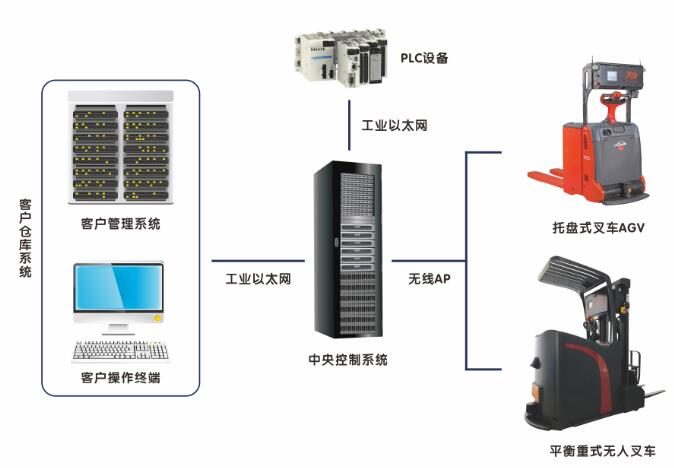
视觉导航智能叉车整体解决方案
适用范围
未来机器人有限公司于2017年3月开始推广第一类核心产品--视觉导航无人叉车系统,凭借着性价比极高、现场环境改造极少、施工周期极短、复杂应用场景适应性极强等四大优势,已得到多家世界500强及上市企业认可并签订合同,已合作企业包括:京东物流、格力电器、P&G、华迅众联物流、广东景兴ABC、华新包装等。另外,公司已与上海临港集团签订合作协议,成立临港智能研究院。拟以100台智能叉车系统作为研究院的示范项目,临港现已引入普洛斯临港集团作为项目使用方备选之一与公司洽谈合作事宜。此外,公司目前也有跟进洽谈一批有意向的客户,行业布局包括日化、食品、家电、纸业制造等。
未来机器人的产品可广泛应用于物流、制造、建筑及服务业,具体行业划分包括电商物流、第三方物流、航空物流、新零售快消品、家电、家居、日化、食品、3C电子等。





























获取更多评论