SSDC驱动器闭环步进模式与伺服模式的区别
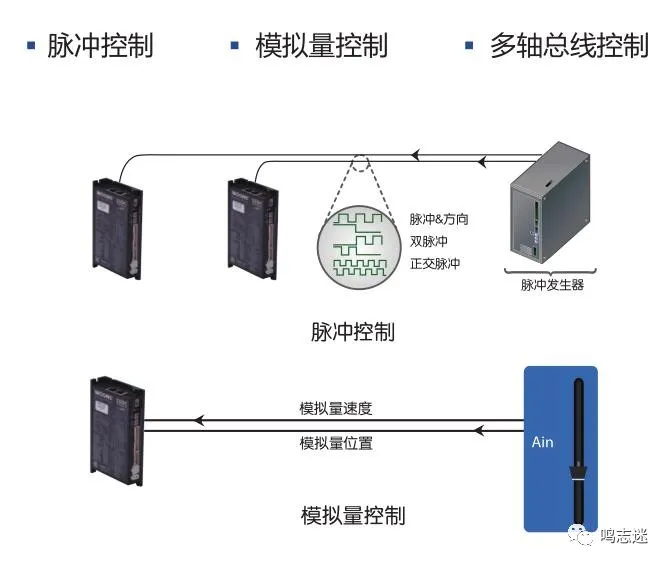
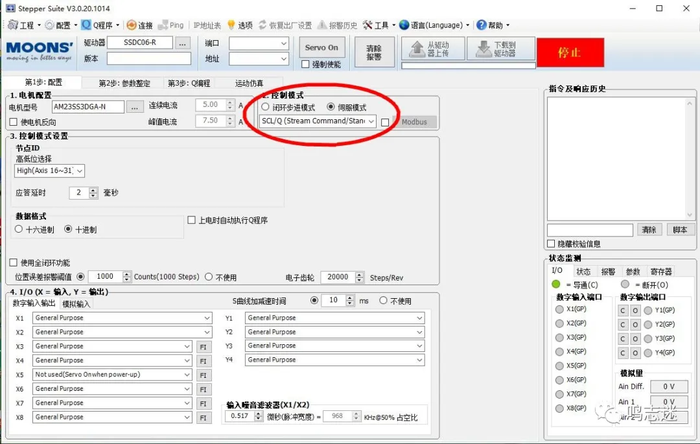
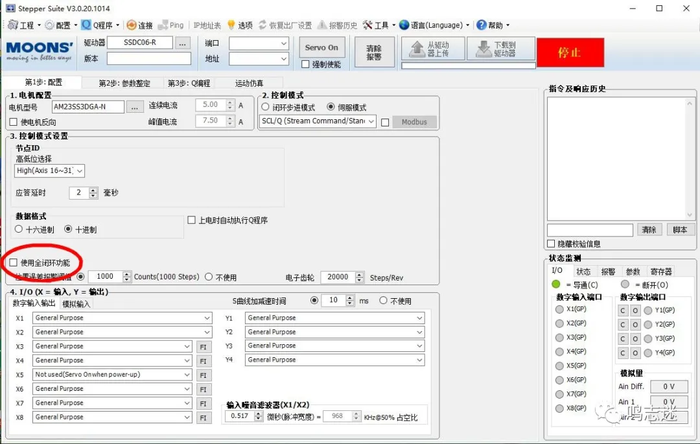
SSDC 系列是一款高性能、智能型总线步进伺服驱动系统。将伺服控制技术融入步进系统中实现闭环控制,创造出开环步进系统难以实现的优异性能。支持多种控制模式,既支持传统的脉冲控制, 也可以通过 SCL 指令,Modbus,CANopen,eSCL指令,EtherNet/IP 或 EtherCAT 协议对驱动器和电机进行实时控制,还可以预先将运动控制程序存储到驱动器里(Q 程序),再通过各种总线通讯指令灵活调用。
关于闭环步进模式与伺服模式的区别是什么呢?
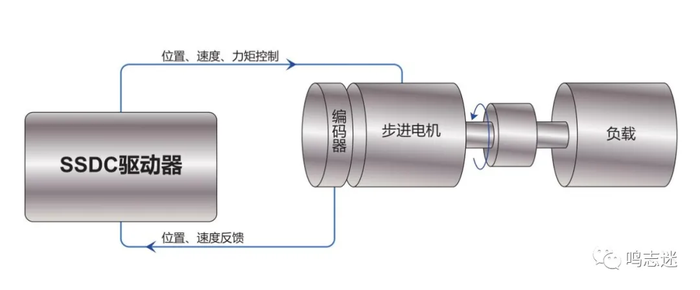
闭环伺服模式
位置、速度和电流闭环控制。精确的位置及速度控制以满足苛刻的应用要求;根据实际负载情况实时调整电流大小;高鲁棒性的伺服控制可适应宽范围的惯性负载和摩擦负载变化。
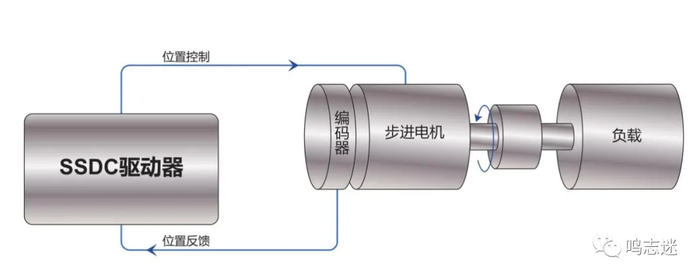
闭环步进模式
位置闭环控制。极强的易用性,无需参数整定,静止无抖振,防堵转。
闭环步进模式适用于一些对于抖动要求特别高的特殊应用,如:视觉系统,纳米科技、半导体制造、喷墨打印机等。
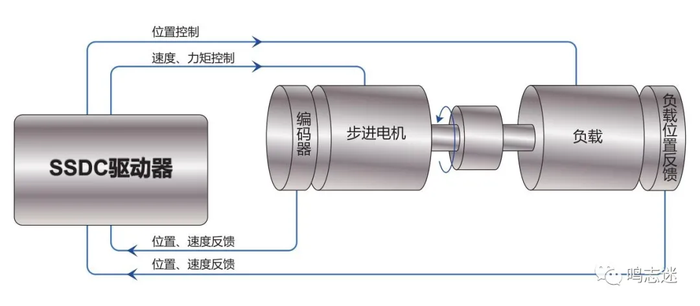
全闭环模式 —— 两路位置反馈
支持两路位置反馈,一路接电机内部编码器反馈,另一路可接负载端外部位置反馈,可避免传动机构机械误差带来的位置误差,实现更精确地位置控制。负载外部位置反馈类型:光栅尺
总结:
在闭环伺服模式下运行,电机的力矩可以被100%充分利用,系统设计时无需考虑力矩冗余。
1、在大多数应用场合,电机可以最大瞬时输出125%-150%的额定力矩,大力矩输出在某些情况下可以简化减速机构的复杂度。
2、25%-50%过载能力在短距离,高加减速的应用场合将系统优化得更加高效。
热点文章
-

-

西门子推出提升驱动链能效和可持续发展的全面数字化解决方案
2024-04-19
-

2024汉诺威工业展:施耐德电气以软件、自动化和电气化铸就工业影响力
2024-04-23
-

汉诺威时刻 | 西门子首推面向工程设计的生成式AI产品
2024-04-23
-
旗舰新品、西门子官宣、央视亮相!节卡机器人闪耀汉诺威工业博览会,全球智造再升级
2024-04-25
-

舍弗勒强化与西门子在人工智能领域的合作
2024-04-24
-

-

精品荟萃,智造先锋在花城精彩绽放 ——2024 SPS广州智能制造展侧记
开创华南智造新机遇,SPS 广州智能制造展于 2024 年 3 月 4日 至 6 日在花城广州中国进出口商品交易会展馆 B 区盛大举办!
作者:
-
构建开放生态 赋能持续创新
-
扎根中国:本土之选 服务全球——访缆普集团首席研发技术官Hubertus Breier先生
-
聚焦精准 智能可鉴
-
探索下一步,红帽论坛诠释智能创新之道
-
布局新兴行业 拓展智能应用







评论
加载更多