皮尔磁:AGV的应用场景评估
移动搬运机器人,作为智能工厂物流的核心设备之一,在工厂物流自动化体系中发挥着重要的作用。AGV装备有自动导引装置,可以保障系统在不需要人工引航和任何固定标记物的情况下,沿着灵活多变的路径自动行驶,并躲避行进路径上的障碍物和人员。

AGV安全控制系统的重要安全功能
随着AGV应用需求的不断增长,国内外涌现出了许多优秀的AGV制造商以及能够提供相关解决方案的供应商。专门针对无人驾驶工业车辆及其系统安全的ISO 3691-4标准也于2020年正式发布实施,填补了行业标准的空白。
ISO 3691-4:2020在延续EN1525技术框架的基础上,进一步完善了安全架构,拓展了安全功能要求,对AGV的安全控制系统和使用场景等提出了更高的要求,所涉条目更为细致、具体和全面。在新标准中规定了作业区域的安全要求,以便卡车能够安全运行。
1. 作业区域
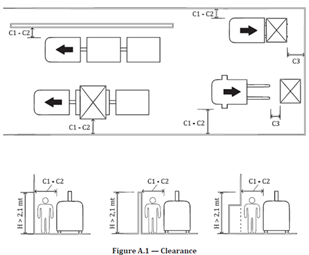
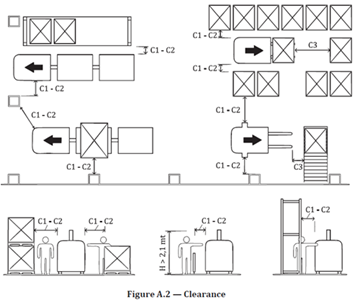
应在AGV行进道路的两侧提供至少0.5米宽,2.1米高的间隙空间。该间隙空间是在AGV行进道路和沿路相邻的固定结构之间测量而得。
2. 作业危险区域
间隙空间不足的区域或人员检测手段无法提供保护的区域被指定为“作业危险区域”,并做出相应的标记。作业危险区域应通过适当的标志或对地板/地面的标记来明确标示,应避免与其它标记和标志混淆。
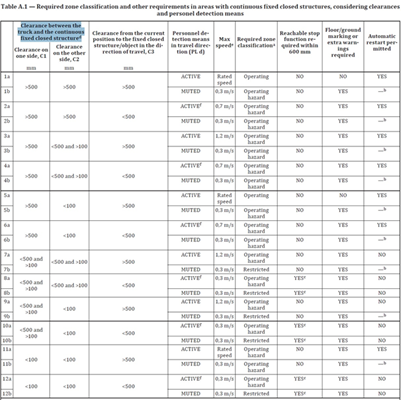
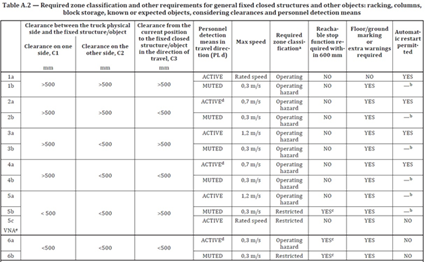
在这个作业危险区域,卡车的速度应符合标准中表A.1和表A.2的规定,卡车应发出额外的声音和/或光学警告。
如果间隙空间不足且没有至少0.5米宽和2.1米高的行人逃生通道,则应启动人员检测系统来确保能够探测到处于ESPE的安全区域边缘和周围物体之间180mm以内的区域,以检查该区域内是否有人员。
3. 限制区域
间隙空间不足且人员检测系统无法进行保护的区域应被指定为“限制区域”并作相应标记。
限制区域应采取以下措施:
a)区域用标志和地板/地面标记清楚地标示
b)区域内只允许经过特定危险性培训的授权人员进入
c)区域内不能包含任何工作场所
d)区域周边配备符合ISO 13857和ISO 14120的固定式防护装置,并且防护装置的高度至少为2.1米。
e)区域应装有可移动的防护装置(门)为授权人员提供通道。
4. 封闭区域
一个可以屏蔽人员检测系统并允许AGV以任何速度运行的区域应被指定为“封闭区域”并作相应的标记。封闭区域应采取以下措施:
a)区域用标志和地板/地面标记清楚地标示
b)区域内仅限授权人员进入
c)区域内不能包含任何工作场所
d)区域周边配置符合ISO 13857和ISO 14120的固定式防护装置,并且至少有2.1米高
e)区域应装有带防护锁定功能的可移动式联锁防护装置(门)为授权人员提供通道。
5. 负载装卸区
该区域应只能在指定的位置和卡车位置安排进行负载装卸的操作。负载装卸区的设计不能防止人员受到伤害,该区域应被视为作业危险区域。
新标准中还针对AGV的行进路线两侧的间隙空间,人员检测系统的启停,AGV的最大运行和区域的划分罗列了如下表格,为了AGV能够更高效、更安全地在工厂内部运行,同时让工厂员工能够更好地避免与AGV发生不必要的安全事故。
安全激光扫描仪:AGV安全防护的“当家花旦”
安全激光扫描仪作为检测AGV行进路径中的人员或物体的安全装置,可在AGV高速运行时提供安全性且不影响生产效率,保护人和物的安全。皮尔磁的安全激光扫描仪PSENscan扫描角度可达275度,保护区范围宽度可达5.5米,不但警告区域和保护区域可自由配置,还具有超强的环境自适应的能力,非常适合AGV的安全控制回路集成,特别适合于多个区域的防护监控。
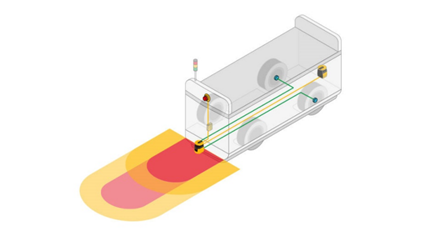
在实际应用中,借助两个PSENscan即可实现360°全方位的安全保护。在AGV行进过程中,PSENscan可根据当前的行驶路径灵活切换到合适的保护区或警告区,即使在AGV转弯时也可确保安全,与此同时,PSENscan还可测量所处环境中与物体的距离,此信息可用于为自动导引车直接导航。

热点文章
-

2024汉诺威工业展:施耐德电气以软件、自动化和电气化铸就工业影响力
2024-04-23
-

预约直播 | 2024汉诺威,施耐德电气“特”有料!
2024-04-18
-

-

西门子推出提升驱动链能效和可持续发展的全面数字化解决方案
2024-04-19
-

菲尼克斯电气丨汉诺威打卡攻略 第一条就心动了
2024-04-18
-

创新塑造工业影响力!施耐德电气即将亮相2024汉诺威工业博览会
2024-04-18
-

汉诺威时刻 | 西门子首推面向工程设计的生成式AI产品
2024-04-23
-

精品荟萃,智造先锋在花城精彩绽放 ——2024 SPS广州智能制造展侧记
开创华南智造新机遇,SPS 广州智能制造展于 2024 年 3 月 4日 至 6 日在花城广州中国进出口商品交易会展馆 B 区盛大举办!
作者:
-
构建开放生态 赋能持续创新
-
扎根中国:本土之选 服务全球——访缆普集团首席研发技术官Hubertus Breier先生
-
聚焦精准 智能可鉴
-
探索下一步,红帽论坛诠释智能创新之道
-
布局新兴行业 拓展智能应用







评论
加载更多